神舟八號與天宮一號完成首次空間交會對接
更新時間:2023-04-21 14:02:10作者:佚名
如何交會?
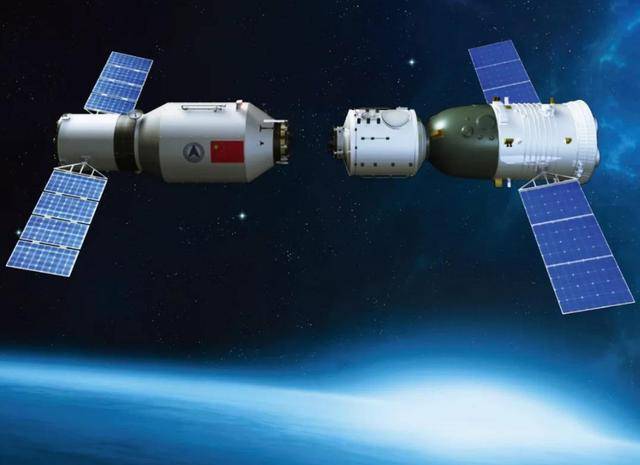
成功對接以后,神舟八號與天宮一號構成了我國首個航天器組合體,共同繞地飛行
這么,交會對接是如何完成的?一般空間交會對接牽涉兩個飛行器,一個是目標飛行器,一個是追蹤飛行器。空間交會與對接過程通常是由地面發射追蹤飛行器神舟八號與天宮一號對接,由地面控制,使它按比目標飛行器稍稍低一點的圓軌道運行;接著,通過變軌,使其踏入與目標航天器高度基本一致的軌道,并與目標航天器構建通訊關系;追蹤飛行器調整自己與目標飛行器的相對距離和姿態,向目標飛行器緊靠;最后當兩個飛行器的距離為零時,完成對接合攏操作,結束對接過程。
以本次神舟八號的交會對接過程為例,我們來仔細看一下。
天宮一號目標飛行器自9月29日在呼和浩特衛星發射中心發射升空后,在地面指令引導下,先后完成了多次軌道控制和平臺在軌檢測工作,于10月30日踏入距地面高度約343英里的近方形交會對接軌道。10月30日19時34分,在南京航天飛行控制中心的準確控制下,天宮一號偏航180度,推行倒飛姿態神舟八號與天宮一號對接,這標識著天宮一號已為推行首次空間交會對接做好了打算。截止30日19時30分,天宮一號已在軌運行30天22小時。依據各項遙測數據監視判定,天宮一號飛行正常、姿態穩定、能源平衡,各項實驗進展順利,具有執行首次交會對接的條件。

神舟八號飛船在最后一個停泊點,距離天宮一號30米
交會對接飛行過程分為遠距離導引段、自主控制段、對接段、組合體飛行段和分離撤出段:
遠距離導引段自神舟八號飛船入軌后開始。在地面測控通訊系統的導引下,神舟八號自11月1日發射入軌以來,分別在第5圈、13圈、16圈、19圈、24圈施行了5次變軌控制。因為變軌控制經常、時間間隔短、空間環境復雜等誘因,對短弧段定軌精度提出了極高的要求。上海航天飛行控制中心選用高精度動力學模型和多種數據源融合的短弧段定軌方式,有效提升了測量軌精度。

神舟八號從初始軌道轉移到與天宮一號目標飛行器共面的330千米的近圓軌道,在天宮一號目標飛行器后下方約52千米處,與其確立穩定的空空通訊鏈路以后,便開始了自主導航,即不借助地面的測控系統發出指令,而是靠事先注入到神舟八號的程序指揮它的飛行。
自主控制段經歷尋的、接近和平移靠攏3個階段,神舟八號飛船自主導航控制到與天宮一號目標飛行器接觸,自主控制飛行過程約需144分鐘。在自主控制階段,從52英里到5英里是尋的段,從5英里到140米是接近段,從140米到對接機構接觸是平移靠攏段。
神舟八號飛船與天宮一號目標飛行器的首次交會對接踏入自主導引段后,從5英里到30米的接近距離之間,前后共設置了4個停泊點,在每一個停泊點都要作短暫逗留。之所以設置這4個停泊點,主要是為了逐步確認各項參數是否正常,最大程度減少風險。
相關文章
為您推薦
加載中...